|
|
|
Analyse & Simulation Cinématique
| Lors de la conception d'un système possédant un ou plusieurs degrés de liberté, Catia permet d'accéder
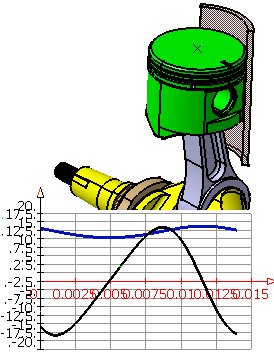
à ses caractéristiques cinématiques : déplacement, vitesse ou accélération. L'exemple ci-contre présente les courbes de déplacement et de vitesse d'un piston issu d'un moteur thermique à 4 temps.
L'atelier permettant de réaliser ces analyses est "DMU Kinematics". Ce dernier ne pourra néanmoins pas rivaliser avec
des modules d'analyses dédiés et donc plus élaborés. Ainsi, le paramètre vitesse angulaire dans l'exemple ci-contre ne pourra être défini qu'implicitement
à travers la définition d'autres paramètres (incrément, temps de simulation etc).
Pour accéder aux données cinématiques, il vous faudra auparavant :
- Définir un assemblage correctement contraint dans l'atelier "Assembly Design"
- Convertir les contraintes d'assemblages en liaisons cinématiques dans l'atelier "DMU Kinematics"
- Définir une ou plusieurs commandes relatives à une ou plusieurs liaisons
Au total, vous devez disposer d'un mécanisme (au sens de l'atelier DMU Kinematics) qui peut être simulé
(Rappel : Catia vous en avertit automatiquement juste après la création de la dernière commande).
Enfin pour étutier la cinématique d'une pièce, vous devez définir des points (dans l'atelier "Part Design" par ex.) dont
les déplacements, vitesses et accélérations seront analysés par la suite (ci-contre, un point a été créé au centre de la face supérieure du piston).
|
 |
Chargement de l'assemblage
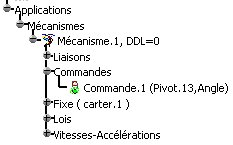
Charger l'assemblage et vérifier que l'arbre des spécifications contient bien dans la rubrique
"Application" les items suivants :
- Mécanisme.1 (ou tout autre nom), DLL=0 (le mécanisme peut être simulé)
- Liaisons (ensemble des liaisons issues de la conversion des contraintes d'assemblage)
- Commandes (associée(s) à une ou plusieurs liaisons)
- Fixe (définition du sous-ensemble lié au bâti)
Activer alors l'atelier "Maquette Numérique / DMU Kinematics"
Pour accéder aux données cinématiques, il vous faudra auparavant :
|
 |
Définition de la commande
| Dans l'arbre des spécifications, double-cliquer sur la 1ère commande et dans la boîte de
dialogue qui apparaît alors, se positionner dans le champ "valeur de la commande". Via le bouton droit, activer la commande "Editer formule".
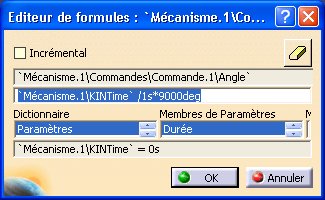
La boîte ci-contre apparaît. Dans notre exemple, il s'agit maintenant de définir la commande en angle du vilebrequin en fonction
de l'incrément de temps.
L'incrément de temps est accessible en sélectionnant le filtre "Paramètres" et "Durée". On obtient ici :
`Mécanisme.1\KINTime` (qui est égal à 0,04/40=0,001 sec).
Dans notre exemple, la loi de commande s'écrit :
Commande.1\Angle=Mécanisme.1\KINTime /1s * 9000deg.
On vérifie que pour KINTime=0,04 alors Commande.1\Angle = 360 deg
|
 |
| Définition des paramètres de simulation |
 |
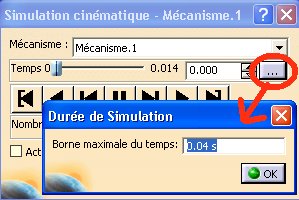
| Activer la commande "Simulation suivant des lois"
et grâce au bouton cerclé de rouge représenté ci-contre, rentrer la valeur de la borne maximale du temps.
Cette borne représente le temps total de simulation.
Pour un mouvement de rotation uniforme, ce temps doit
correspondre à un cycle, soit dans notre exemple un tour de vilebrequin.
Pour une vitesse de 1500 tours/mn, on trouve une borne égale à (60/1500) sec soit 0,04 sec.
Le nombre de pas définit la taille de l'incrément; dans notre exemple, nous avons laissé une valeur de 40. L'incrément vaut donc : 0,04/40 = 0,001 sec.
|
 |
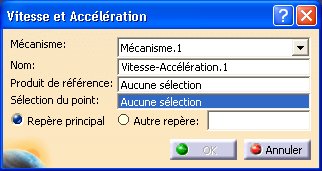
| Définition des capteurs |  |
En utilisant la commande "Vitesse & Accelération", définissez :
- le produit de référence (ici le bâti)
- un point : c'est les caractéristiques cinématiques de ce point qui seront accessibles. Dans notre exemple, c'est le centre de la
face supérieure du piston.
|
 |
| Simulation suivant des lois | |
| En utilisant la commande "Simulation suivant des lois", vérifier tout d'abord que la
simulation est correctement réalisée et que l'intervalle d'étude est conforme à vos attentes.
Puis cocher la case "Activer les capteurs". La fenêtre ci-contre apparaît alors. Sélectionner les
"capteurs" correspondant aux caractéristiques à étudier (ici la vitesse selon l'axe Y du point appartenant au piston par rapport au carter).
Sans fermer la fenêtre, lancer la simulation cinématique dans l'autre feneêtre encore ouverte. Vous pouvez alors
connaître en temps réelles les valeurs instantannées de vos différetns capteurs dans l'onglet correpondant.
A la fin de la simulation, vous pouvez tracer le ou les graphe(s) correspondant à vos capteurs via le bouton "Graphiques" et enregistrer les résultats
dans un fichier (bouton "Fichier").
.
Enfin l'onglet historique vous permet d'obtenir la liste des valeurs pour l'ensemble de la simulation et éventuellement de la remettre à zéro.
|
 |
|
